使用(ransac)随机采样一致算法进行图像匹配
程序员文章站
2022-04-01 12:41:46
...
#include<opencv2/opencv.hpp>
#include<opencv2/xfeatures2d.hpp>
#include<iostream>
using namespace cv;
using namespace cv::xfeatures2d;
using namespace std;
//使用对称性测试以及RANSAC匹配特征点。
//1.这是进行图像匹配的第一步工作,寻找优质的特征点,
//要用这些特征点来计算基本矩阵,所以必须对我们得到的特征点进行精细的筛选工作。
int ratioTest(vector<vector<DMatch> >& matches);
void symmetry(const vector<vector<DMatch>>& matches1, const vector<vector<DMatch>>& matches2, vector<DMatch>& symmetry);
Mat ransac_test(vector<DMatch>& matches, vector<KeyPoint>& keypoints1, vector<KeyPoint>& keypoints2, vector<DMatch>& out_matches);
int main()
{
Mat image = imread("植物.jpg");
Mat image1;
resize(image, image, Size(400, 600));//缩放
//灰度变换
cvtColor(image, image1, CV_BGR2GRAY);
Mat image0 = imread("植物2.jpg");
resize(image0, image0, Size(400, 600));//缩放
Mat image2;
cvtColor(image0, image2, CV_BGR2GRAY);
imshow("image1", image1);
//1.第一步,我们先找到特征点,并且提取特征点的描述子,为下一步做准备。
vector<KeyPoint> keyp1, keyp2;
Ptr<SURF> xx = SURF::create(2000);//检测器。
//hessian值,越大,那么检测到的点就越少,hessian值是一个阈值,或者说是一个淘汰值,小于则不会被选取。
xx->detect(image1, keyp1);//在image中找出特征点。
xx->detect(image2, keyp2);
Mat des1, des2;
xx->compute(image1, keyp1, des1);//描述子。
xx->compute(image2, keyp2, des2);
//1.
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create(1);//描述子匹配器。???????matcherType到底是什么意思???、
vector<vector<DMatch>> matches1,matches2;//DMatch是中有两个元素,指向第一个向量的索引和指向第二个向量的索引。(两个匹配点的信息)
//matches1.distance :less is better越小越好。
//每个图像的一个点,在另一个图像中找到两个匹配点,方便我们筛选,
//如果这两个离的太近,那么说明会产生误差,我们舍弃,如果离的太远,那么说明有一个是可靠的。
matcher->knnMatch(des1, des2, matches1,2);//将复合的匹配放入描述子中。//注意,des2和des1的顺序和结果也有关系。
matcher->knnMatch(des2,des1,matches2,2);//注意knnMatch 的用法,是为一个点找到多个点。
//然后我们需要从中筛选排在前列的匹配点。
//2.
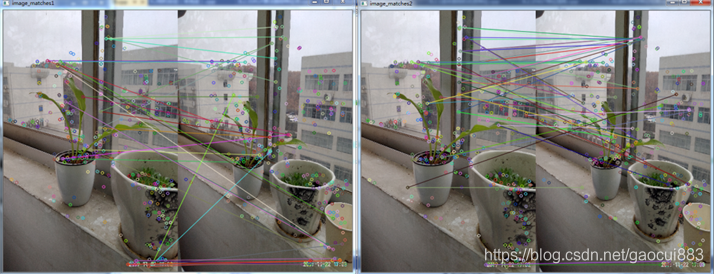
Mat image_matches1, image_matches2;//我们来测试两幅图的匹配是否相同。
//然后我们需要删除那些,两个匹配点非常靠近的点。怎么比较??
//matches.ditance第一个比第二个小,所以,第二越大,说明,两个特征点离的越近,他们的比率就越接近于1.
//所以我们要排除那些比率大于一定阈值的点,我们用一个函数,retioTest();
int removed = ratioTest(matches1);
removed = ratioTest(matches2);
//转换keypoint为point2f//因为findFundamentalMat 只接受point2f格式。
//以上两个语句,我们就移除了会产生歧义的匹配。
//3.我们要看两幅图中对称的匹配点,不对称的我们不考虑。对称方法我们也单独设置一个函数symmetryTest()。
vector<DMatch>sym;
symmetry(matches1,matches2,sym);
//drawMatches(image,keyp1,image0,keyp2,sym,image_matches1);
//imshow("结果",image_matches1);
//求基础矩阵。
Mat fundemental;
vector<DMatch> newone;
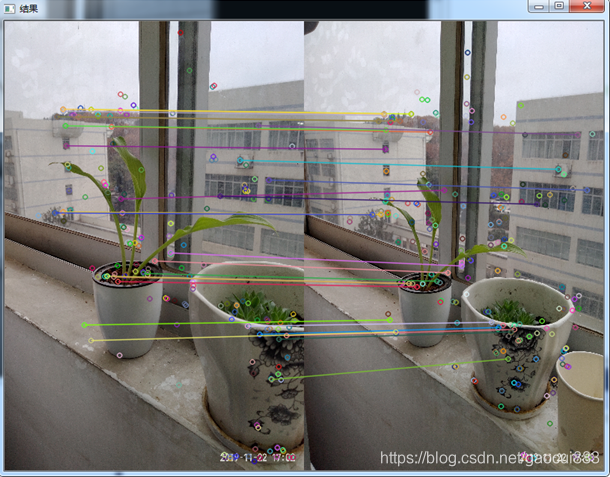
fundemental = ransac_test(sym,keyp1,keyp2,newone);
drawMatches(image, keyp1, image0, keyp2, newone, image_matches1);
imshow("结果",image_matches1);
waitKey(0);
return 0;
}
//删除那些离的太过于相近的特征点。
int ratioTest(vector<vector<DMatch> >& matches) //matches存储着最优点和次优点。
{
int removed = 0;//删除的点计数。
for (vector<vector<DMatch>>::iterator matche_iterator = matches.begin(); matche_iterator != matches.end(); matche_iterator++)
{
if (matche_iterator->size() > 1)//如果存入的两个特征点,才进行处理。
{
if ((*matche_iterator)[0].distance / (*matche_iterator)[1].distance > 0.79)//我们将阈值设置为,说明:这个阈值设置的越大,跃接近于1,说明删除的越少。当阈值等于0时,
//就等于是删除了所有的匹配点。
{
matche_iterator->clear();//移除匹配。
removed++;
}
}
else//将不能达到两个匹配的点,也进行移除。
{
matche_iterator->clear();
removed++;
}
}
return removed;
}
//检验是否对称匹配。
void symmetry(const vector<vector<DMatch>>& matches1, const vector<vector<DMatch>>& matches2, vector<DMatch>& symmetry)
{
for (vector<vector<DMatch>>::const_iterator matche_iterator1 = matches1.begin(); matche_iterator1 != matches1.end(); ++matche_iterator1)
{
if (matche_iterator1->size() < 2) continue;//是之前检验阈值时被删除的点。
for (vector<vector<DMatch>>::const_iterator matche_iterator2 = matches2.begin(); matche_iterator2 != matches2.end(); ++matche_iterator2)
{
if (matche_iterator2->size() < 2) continue;
//开始对称性检测。
if ((*matche_iterator1)[0].queryIdx == (*matche_iterator2)[0].trainIdx && (*matche_iterator2)[0].queryIdx == (*matche_iterator1)[0].trainIdx)
{
symmetry.push_back(DMatch((*matche_iterator1)[0].queryIdx, (*matche_iterator1)[0].trainIdx, (*matche_iterator1)[0].distance));
break;//图一到图二中的下一个匹配,因为是双重循环,我们找的是图一中的最优解。
}//注意,这个break一定要在括号里边。
}
}
}
//我们需要创建一个基于RANSAC方法来计算F矩阵的函数。
Mat ransac_test(vector<DMatch>& matches, vector<KeyPoint>& keypoints1, vector<KeyPoint>& keypoints2, vector<DMatch>& out_matches)
{
//函数输入一个matches,keypoints1,keypoints2
vector<Point2f> points1, points2;
//因为ransac函数不能用keypoints类型,所以要先将keypoints转换为point类型。
for (vector<DMatch>::const_iterator it = matches.begin(); it != matches.end(); ++it)
{
//先得到左图的特征点的point类型,也就是压入,points1
float x = keypoints1[it->queryIdx].pt.x;
float y = keypoints1[it->queryIdx].pt.y;
points1.push_back(Point2f(x,y));
//同理可以得到右边图像对应的点。
x = keypoints2[it->trainIdx].pt.x;
y = keypoints2[it->trainIdx].pt.y;
points2.push_back(Point2f(x, y));
}
//然后开始计算F矩阵。
vector<uchar>inliers(points1.size(),0);
Mat fundemental = findFundamentalMat(Mat(points1),Mat(points2),inliers,CV_FM_RANSAC);
//提取通过的匹配点。
vector<uchar>::const_iterator itIn = inliers.begin();
vector<DMatch>::const_iterator itM = matches.begin();
for (; itIn != inliers.end(); ++itIn, ++itM)
{
if (*itIn)//不为空
{
out_matches.push_back(*itM);
}
}
//改善F矩阵。也就是用out_matches再进行一遍随机抽样连续一致算法。
points1.clear();
points2.clear();
for (vector<DMatch>::const_iterator it = out_matches.begin(); it != out_matches.end(); ++it)
{
//先得到左图的特征点的point类型,也就是压入,points1
float x = keypoints1[it->queryIdx].pt.x;
float y = keypoints1[it->queryIdx].pt.y;
points1.push_back(Point2f(x, y));
//同理可以得到右边图像对应的点。
x = keypoints2[it->trainIdx].pt.x;
y = keypoints2[it->trainIdx].pt.y;
points2.push_back(Point2f(x, y));
}
fundemental = findFundamentalMat(Mat(points1),Mat(points2));
return fundemental;
}
```
上一篇: Omkar and Circle